The basic control system I started to use was copied from my brothers carrier deck models, this comprised of the following.
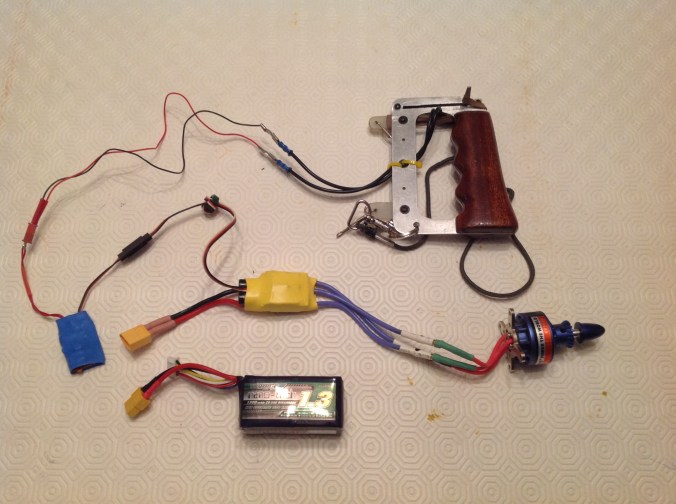
Handle with 47k varible resistor fitted to work the speed of the electric motors.
The handle was then connected via insulated lines to the bel-crank and then onto a RC servo tester ( this is the type you connect to servos and turn the knob to check the movement of the servo).
The output from the servo tester is then feed to the speed controller, which then feeds the signal to the motor, the speed controller must be fitted with a BEC to supply power to the servo tester.
I have used this system now for many years and it has proved very reliable, photo below shows the arrangement.